Když se řekne robot, vybavíme si nejčastěji průmyslové stroje, protetické končetiny nebo možná humanoidní výtvory jako vystřižené z románů science fiction. Věděli jste však, že se vyvíjí roboti, kteří jsou tak malí, že abyste je vůbec viděli, potřebujete mikroskop? Nejmenší z nich měří řádově desítky mikrometrů. Na rozdíl od jejich rozměrů je potenciální význam mikrorobotů obrovský, například mohou změnit zdravotní péči nebo ovlivňovat chování buněk.
Doposud se většina výzkumu zaměřovala na autonomní mikroroboty, kteří jsou tak malí, že mohou proplouvat krevním řečištěm. Aby se dostali na cílové místo v organismu, je možné je pohánět a ovládat magnetickým polem, ultrazvukem, nebo dokonce světlem. Mikroroboti mohou být propojeni s ovládacími prvky i fyzicky: prostřednictvím kabelu nebo optického vlákna. Přímé spojení přináší dvě hlavní výhody: lepší ovládání pozice mikrorobota a jednodušší dodávání energie.

Obrázek 1: Mikrogripper je vytištěn na optickém vlákně o průměru 125 μm. Světlo z laseru prosvítá vláknem a odražené spektrum lze zpětně odečíst. Tenké vrstvy polymeru (které mají tloušťku přibližně 1 μm) jsou zavěšeny na třech pružinách, které způsobují interferenční obrazec. Jak se chapadlo zavírá, zmenšují se vzduchové mezery mezi polymerními vrstvami a výsledkem je také změna interferenčního obrazce. Tuto skutečnost lze použít k trénování modelu, aby se naučil odhadnout sílu úchopu.
Výzkumný tým na Imperial College v Londýně ohlásil pokrok ve vývoji „připojeného“ mikrorobota. Jedná se o mechanický „chytač“, mikrogripper, jehož rozměry nepřekračují 100 µm (1 µm neboli mikrometr je miliontina metru). Je tedy tak malý, že vědci potřebují skenovací elektronový mikroskop, aby vlastně viděli, jak „chapadlo“ vypadá, a mohli jej sledovat v akci. V Imperial College k tomu využívají elektronový mikroskop TESCAN a podělili se s námi o detaily z výzkumu.
Mikrogripper byl vyroben pomocí speciální metody 3D tisku spočívající ve dvoufotonové polymeraci. Během ní ultrakrátké laserové pulsy spouštějí vysoce lokalizovanou chemickou reakci ve vrstvě rozpustného fotocitlivého materiálu, podobného tomu, který se používá při výrobě polovodičů. Po vystavení laseru se materiál stane nerozpustným a po promytí ve vývojové lázni zůstane jen samonosná 3D struktura. Tento proces umožňuje výrobu struktur v mikroskopickém měřítku s přesností pouhých 100 nanometrů, tedy desetiny mikrometru. Pomocí této techniky vědci vytiskli celý mikrogripper najednou, a to přímo na špičku optického vlákna. Ačkoliv to zní jednoduše, je to poprvé, co se podařilo vytvořit mikrorobotický systém na tomto podkladu.
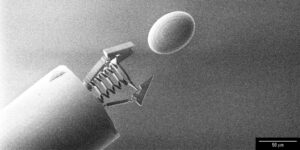
Obrázek 2: Mikrogripper, vytištěný pomocí dvoufotonové polymerace (technika 3D tisku v mikroskopickém měřítku) na podklad z optických vláken, se blíží k elipsoidnímu objektu.
Mikrogripper se dokáže pohybovat v prostoru díky mikromanipulátoru, který pomocí počítače a joysticku převádí všechny pohyby ruky operátora. Úchopu je dosaženo pomocí pohybu podél středové osy, který má za následek uzavírání „prstů“. Mikrogripper poskytuje zpětnou vazbu tlaku na předmět tím, že snímá sílu úchopu. Ke středové „dlani“ a spodní části prstů jsou připevněny tři pružiny. Když se chapadlo dotkne objektu, prsty se zavírají dovnitř, pružiny se stlačují a vzdálenost mezi rovnoběžnými destičkami se zmenšuje. Tento pohyb je klíčem k mechanismu snímání síly.
Světlo proudící optickým vláknem je částečně přenášeno a částečně odráženo každou z těchto miniaturních kruhových desek. Změny vzdáleností mezi destičkami vytváří různá spektra odraženého světla. Tento proces je snímán optickým vláknem a data přenášena do spektrometru. Analýza naměřených hodnot spektra poskytuje informaci o síle komprese chapadla. Princip optického snímání síly je znázorněn na obrázku 3.
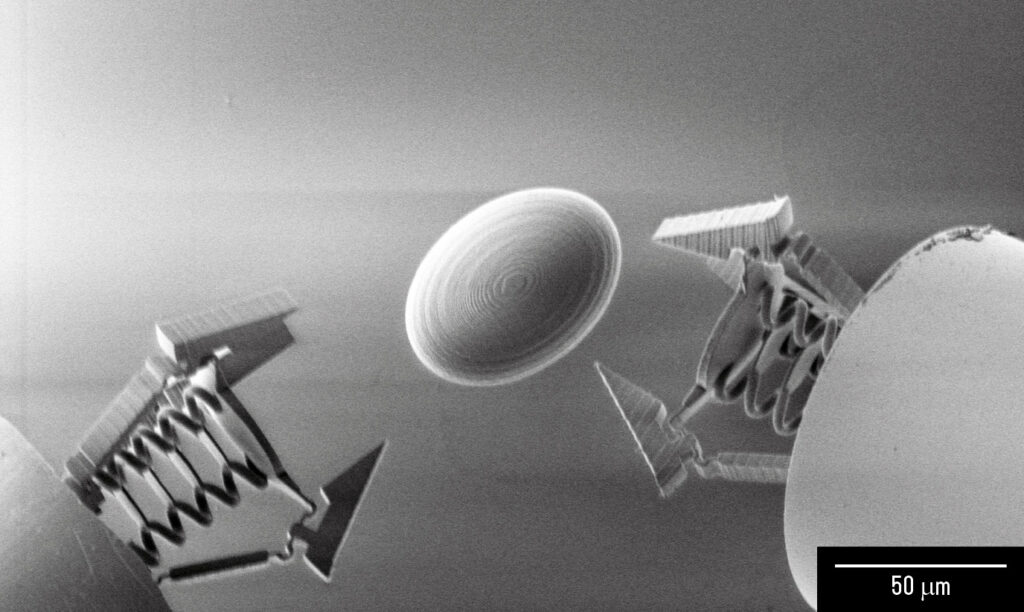
Obrázek 3: Dva mikrogrippery se blíží k cílovému objektu. Dokáží cílovým objektem citlivě manipulovat nebo jej přepravovat.
Jedná se o první mikromanipulační nástroj pro snímání síly na světě vyrobený metodou dvoufotonové polymerace. Zařízení má významný potenciál pro použití v buněčné manipulaci a mikroskopické chirurgii, protože je schopno manipulovat s měkkými a křehkými předměty na buněčné úrovni. Přestože se jedná o pasivní systém, kdy se prsty zavírají pouze tehdy, když se dotknete „dlaně“, má konstrukce, založená na optických vláknech, potenciál dodat energii k aktivaci chapadla. Právě na to se výzkumný tým na Imperial College zaměří v budoucích návrzích, aby opět trochu přiblížil sen o mikrochirurgii na buněčné úrovni. I při dalších fázích tohoto vývoje budou hrát zásadní roli skenovací elektronové mikroskopy TESCAN.

Výzkumníci Maura Power a Paul Wood z Imperial College London.